The streets around our house have many potholes, which fill up with ice:

Water expands when it freezes, which means when a hole fills with water that freezes, the ice can potentially make the hole bigger. To do this, the ice puts pressure on the asphalt, and vice versa. Adding pressure can make it more difficult for ice to freeze, so I looked up some info on asphalt strength. This paper gave a plot comparing the bond strength for different aging times:
 |
| Figure 8 |
These are all around 2-4 MPa. We can look at the phase diagram for water to see how this would affect freezing:
 |
| Wikipedia |
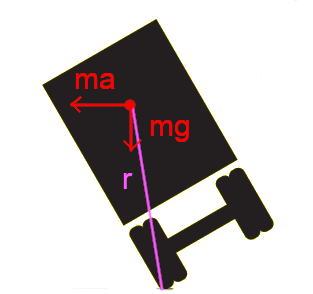
This is well within the range where the freezing point is still around 0°C, so we don't need to worry about the pressure we're applying. Water expands by about 9% when it freezes, so we can imagine water filling a crack, then pushing out in all directions:

That's the general idea I had in mind, but getting into the details, the steps I used are
- Begin with a flat road. Put a dent in the center with depth y0 (*parameter).
- Find all points below the road, and use them to define a polygon.
- Find the centroid (center of mass) of the polygon and push all points out by 9%.
- Push the polygon down according to its weight (*parameter).
- Add points anywhere the separation has passed a threshold.
- Adjust points along line for equal spacing.
- Repeat from 2.
I added steps 5 and 6 since otherwise the crack just scaled up from the initial dent. We can look at the type of crack these steps give as we cycle through freezes/melts:

This seems a little extreme, but we can take a look at how this changes with the two parameters I marked above. The two qualities I was mainly interested in were the width and depth of the crack. We can see how those change in time with different y0 and weight values:


It makes sense these curves look exponential, since the increase depends on the current size. What really surprised me though was how well-separated these two qualities are according to the input weight and y0. These plots suggest that the width is almost wholly determined by the weight, and the depth by the initial depth. For the depth, this can easily be tied to the exponential behavior – Starting deeper increases the rate the depth increases. A little less obvious is the weight, but if we look at the initial diagram of the setup, the wedge shape of the ice means pushing down also pushes out. A quality of exponential systems is that they can very quickly get away from their starting point if left unchecked – A reminder to keep those roads smooth!